Research Development Toolkit
Authors
Introduction
Motivation – Heterogeneity
Software systems in a scientific context:
- Large: Often tens to hundreds of software components
- Heterogeneous: Hosting solutions, version control systems, programming languages, build systems, licenses, maintenance models, 3rd party/1st party, legacy components
- Complex: Dependency structure, versions, variability
Researchers develop software in many different ways:
- Everyone tries to use best suited technologies and process
- Different non-functional requirements (documentation, maintainability, maturity, level of professionalism in development process)
- Teams set up their own CI, sometimes repository hosting – centralized IT services focus on other aspects
Introduction – Example System
Introduction – Goal
Bringing together multiple usually disparate aspects:
- Organizational, social and historical aspects of projects
- Versioning (across version control systems and repository hosting solutions)
- Build system-level dependencies (across build systems and programming languages)
to facilitate
- Construction and testing
- Deployment
- (Re-)use and reproducibility
- Documentation
- Dissemination
of large, heterogeneous, complex research software system
Agenda for this Presentation
- General approach
- System description model and language
- Dependency and metadata analysis
- Repository server, collaboration process
- Operations
- Reproducibility of software, experiments and publications
- Best practices
- Specific aspects
- Build generator tool
- Bootstrapping
- Docker slave configuration
- Research software catalog
Description Language
Description Language – Concepts
- Project in this context:
- Logical, organizational concept
- Has a history, has versions, one or more manifestations (Example: RSB middleware used to live in a Redmine, now GitHub)
- Cannot be built or executed
- Project Version in this context:
- Concrete, consists of source code artifacts
- Often a particular revision in a particular repository
- Can be built, producing one (or more) components
- Distribution in this context:
- Collection of project versions that can be built, deployed and used together
- Can be built, producing a system consisting of components
Domain: Research Software Systems
Core domain concepts:
- Project, Project Version, Distribution
- System, Component
Other important (domain) concepts:
- Dependency
- Required, provided feature
- Target platform
- Variability
- Composition
- Generalization
- Build step description
- Metadata
- Person, Role
Simplified Meta Model
Recipes – Concrete Syntax
- Recipes describe instances of metamodel concepts:
- Project recipes: Projects and project versions
- Distribition recipes: Distributions
- Template recipes: Templates and aspects
- Person recipes: People
Recipe syntax is based on YAML
1: # Comments! Take that JSON! 2: scalar: | 3: Long text with "" and '' and even \ 4: list: 5: - first 6: - second 7: mapping: 8: key: value
Each recipe kind has a schema which, among other things, organizes the recipe into sections:
catalog: … variables: … include: … versions: …
- Variable substitution syntax
- Scalar reference:
${NAME|DEFAULT} - Splicing reference:
@{NAME|DEFAULT} - Delegation:
${next-value|DEFAULT}
- Scalar reference:
Recipes – Example
Project Recipe rsb-cpp.project
1: templates: # Generalization 2: - github 3: - cmake-cpp 4: 5: variables: 6: recipe.maintainer: # People 7: - Jan Moringen <jmoringe@techfak.uni-bielefeld.de> 8: access: public # Metadata 9: 10: github.user: open-rsx # Repository 11: github.project: rsb-cpp 12: 13: branches: [ master ] # Minimal specification of versions
Distribution Recipe my-distribution.distribution
1: include: 2: - other-distribution # Composition 3: 4: versions: 5: - name: rsb-cpp 6: versions: 7: - version: master 8: - parameters: # Variability 9: cmake.options: 10: - '@{next-value|[]}' 11: - CMAKE_BUILD_TYPE=Debug 12: - rsb-python@master
Recipes – Repository
One aspect of the Cognitive Interaction Toolkit is a shared repository of recipes describing software projects and software systems:
| Recipes | 1580 |
| ├─Project Recipes | 1380 |
| └─Distribution Recipes | 200 |
| Commits | 9000 |
| Contributors | 100 |
Recipes – Demo
Dependency and Metadata Analysis
Automatic Analysis – Motivation
Concise recipes are enabled by automatic analysis.
By inspecting a particular revision in the repository associated to a project version, automatically determine the following information (so recipe authors do not have to explicitly declare it):
- Dependencies
- Provided features (ideally with versions and scope)
- Required features (ideally with versions and scope)
- Metadata
- People (authors, maintainers, committers)
- License(s)
- Description
- Access restrictions
- Build Steps
- Names of modules
- Produced artifacts
Automatic Analysis – Dependency Model
- Feature: triple (nature, target[, version])
- Project versions provide features (usually versioned)
- Project versions require features (versioned or unversioned)
- System packages provide features
Automatic Analysis – Examples
CMake
1: project(myproject VERSION 1.2 # provides cmake:myproject:1.2 2: LANGUAGES C C++) # metadata 3: 4: find_package(alibrary 1.0 REQUIRED) # requires cmake:alibrary:1.0 5: 6: pkg_search_modules(another_library) # requires pkg-config:another_library
Maven
1: <project> 2: … 3: <licenses>…</licenses> <!-- metadata --> 4: <organization>…</organization> 5: … 6: <groupId>open-rsx</groupId> <!-- provides maven:open-rsx/rsb:0.18 --> 7: <artifactId>rsb</artifactId> 8: <version>0.18</version> 9: … 10: <dependencies> 11: <dependency> <!-- requires maven:junit/junit:1.0 --> 12: <groupId>junit</groupId> 13: <artifactId>junit</artifactId> 14: <version>1.0</version> 15: </dependency> 16: </dependencies> 17: … 18: </project>
Python Setuptools
1: setup(name = 'rsb', # provides setuptools:rsb:0.18 2: version = '0.18', 3: 4: description = "Event-driven …", # metadata 5: author = 'Johannes Wienke', 6: license = 'LGPLv3+', 7: 8: install_requires = [ # requires setuptools:protobuf:2.8 9: 'protobuf>=2.8' 10: ] 11: … 12: )
ROS Package
1: <package> 2: <name>robo_nav</name> <!-- provides ros-package:robo_nav:0.1 --> 3: <version>0.1</version> 4: 5: <description>…</description> <!-- metadata --> 6: <maintainer email="…">…</maintainer> 7: <author email="…">…</author> 8: <license>BSD</license> 9: 10: <build_depend> <!-- requires ros-package:path_planner --> 11: path_planner 12: </build_depend> 13: </package>
Automatic Analysis – Limitations and Strategies
- Accuracy of automatic analysis results depends on project type:
- Complete and exact (Maven, ROS packages, pkg-config)
- Potentially incomplete and Heuristic (CMake, Python setuptools)
Thus: recipe authors can help out:
1: extra-requires: 2: - '@{next-value|[]}' 3: - nature: 4: target: 5: version:
extra-requires,extra-providestake part in delegation and are merged with results of automatic analysis- Also an extension point: analysis strategies for new project natures can be added
- Future work (proof-of-concept stage): limited interpretation for complicated cases for CMake and Python setuptools
Platform Requirements
Declaration
1: variables: 2: platform-requires: 3: ubuntu: 4: packages: 5: - '@{next-value}' 6: - gcc 7: bionic: 8: packages: 9: - '@{next-value}' 10: - clang
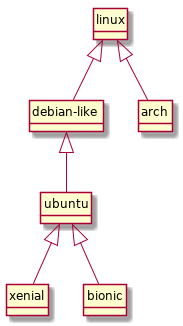
- Merged according to platform hierarchy
- Can be declared in
- Project recipes
- Template recipes. For example, all Maven projects need a JDK
- Future improvement: further automation based on required features
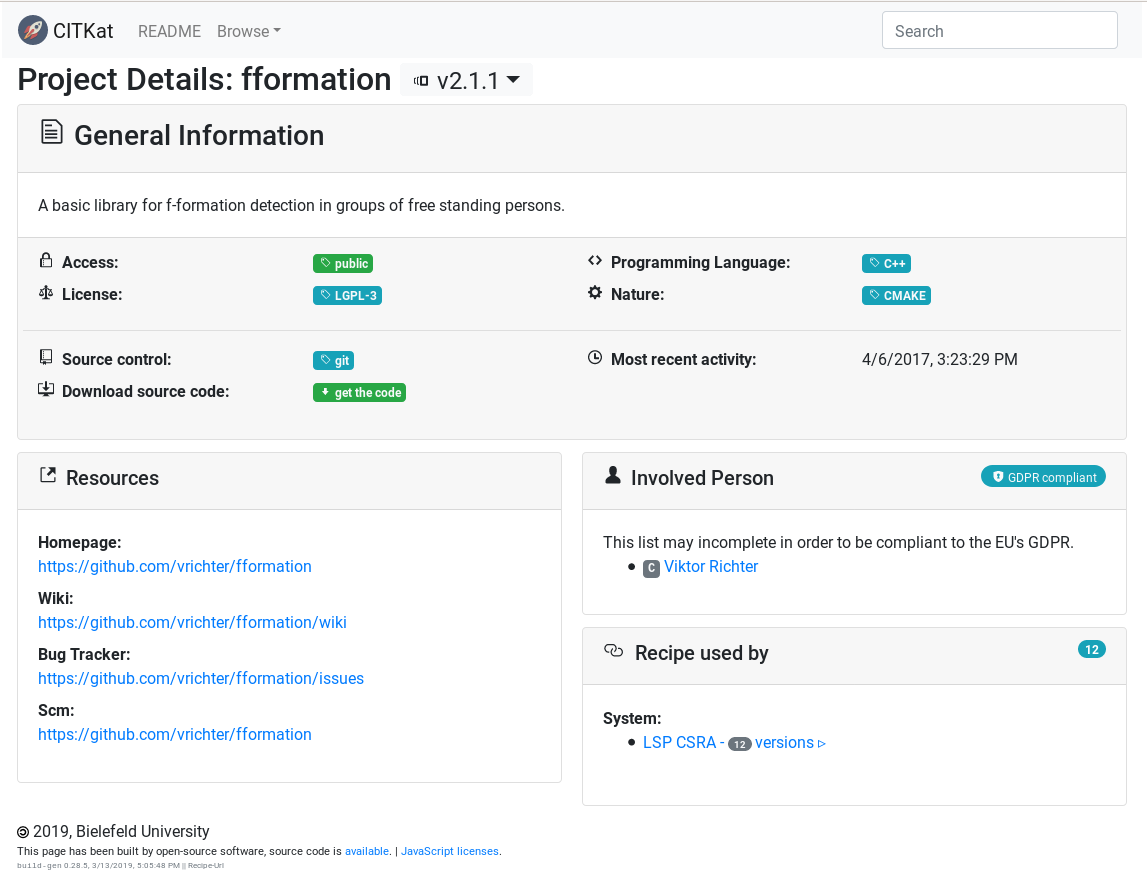
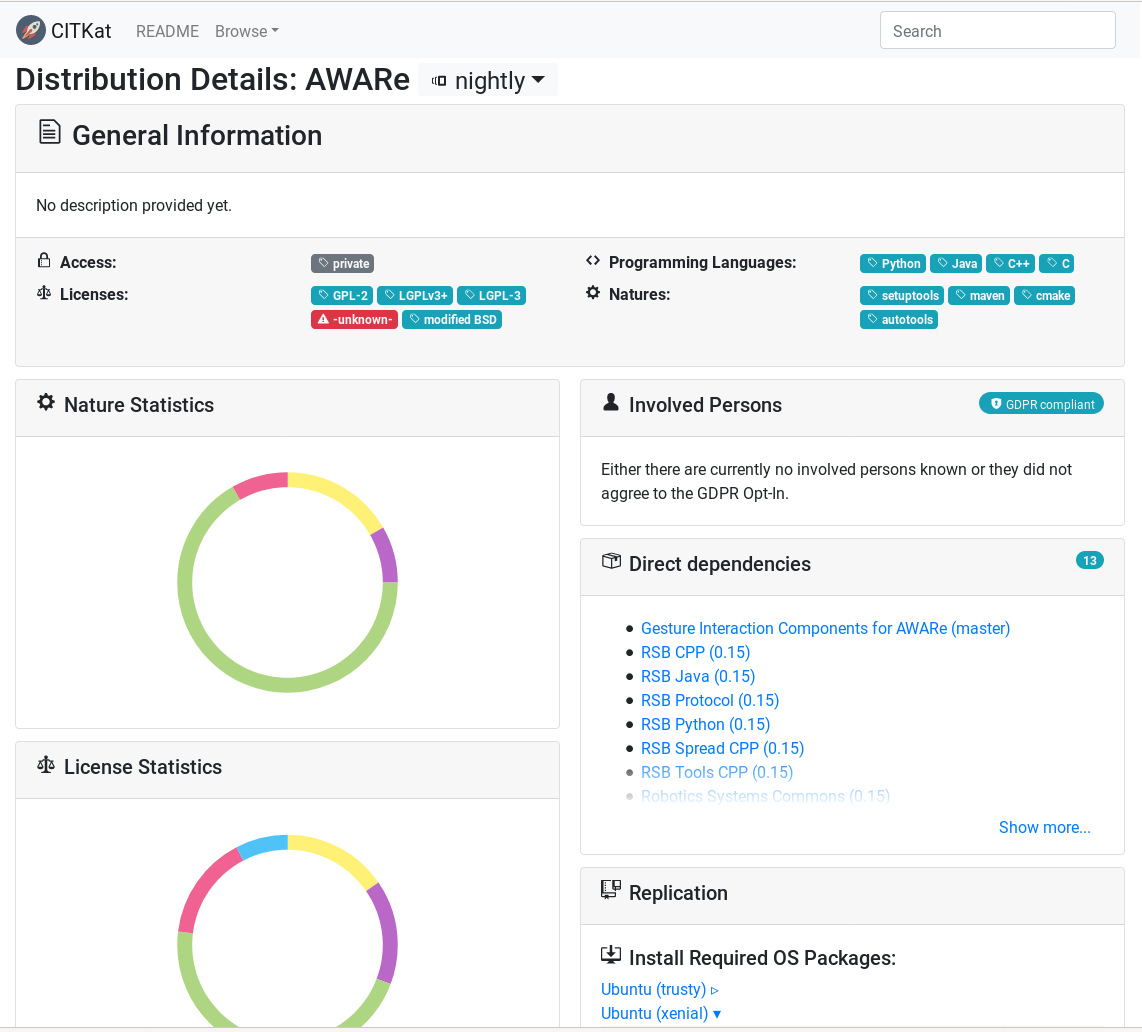
Catalog
Automatic analysis and metadata is also useful for humans:
Analysis – Demo
Analyzing a repository
./build-generator analyze https://github.com/open-rsx/rsb-cpp > results.json xdg-open results.json
Computing platform requirements for a distribution
./build-generator platform-requirements \ -p 'ubuntu xenial' \ PATH-TO-CITK/recipes/distributions/rsb-nightly.distribution
Build Generator
Build Generator – Overview
- Starting point for users
- Unified commandline interface for
- Installing and configuring Jenkins instances
- Working with recipes (validation, analysis, reports, …)
- Generating Jenkins jobs
- Generating other build processes (
Makefile,DockerFile)
- Single (large, 30 MB) binary
- Reasonably portable across Linux systems
- Few dependencies (OpenSSL's
libsslbeing the annoying one)
- Source code and binary releases on GitHub: https://github.com/rdtk/generator
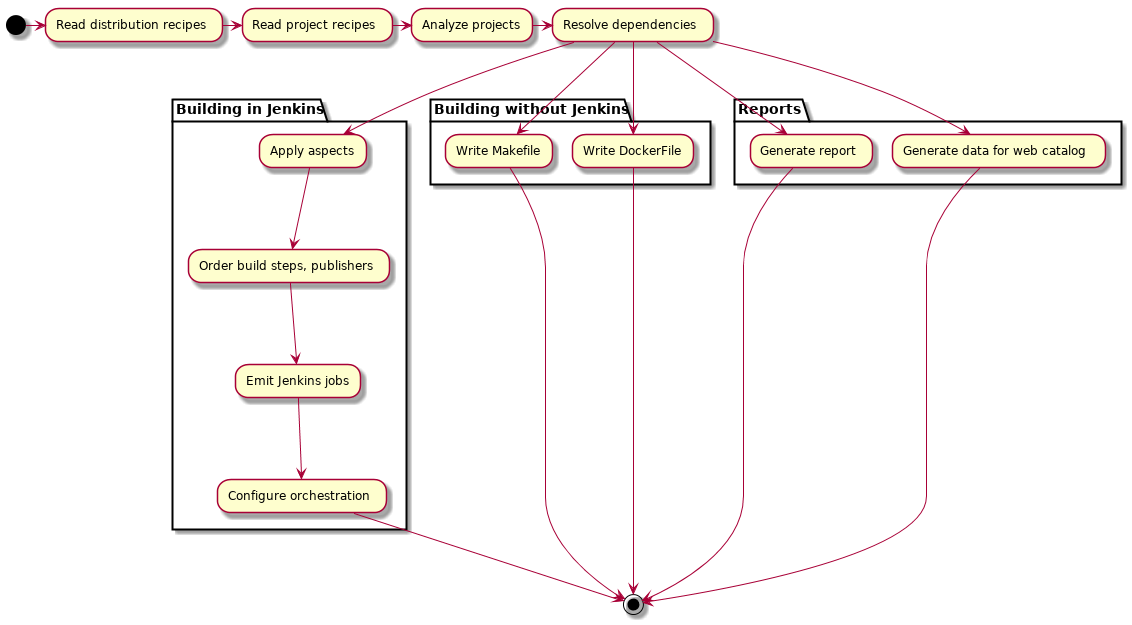
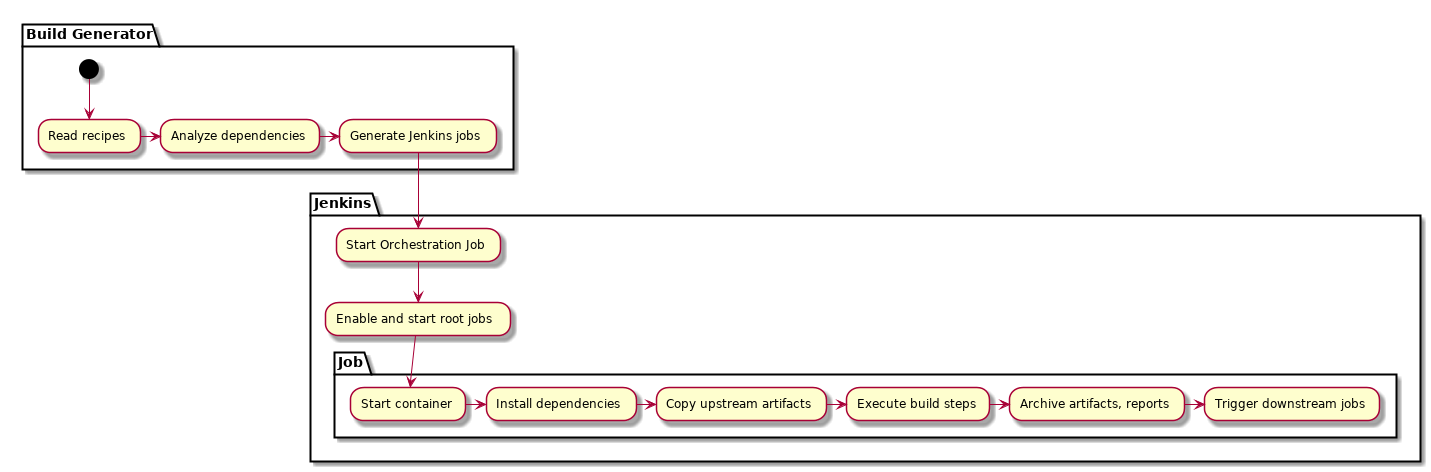
Build Generator – Process
End of "Generic Approach" Part of the Presentation
Now we address and discuss the following more specific aspects:
- Bootstrapping the aforementioned tools and processes on a user's computer
- Automatically configuring Docker-based Jenkins slaves for continuous integration
Bootstrapping
Bootstrapping – Motivation
Scenario:
- User wants to try out, reproduce, develop or learn a continuous integration setup on their own machine
- Running Linux, Docker installed
- Doesn't want to modify or pollute system with lots of software
- Doesn't want to manually apply a long list of setup steps
The requirements are thus:
- Initial download and installation should be minimal
- From there, maximum automation, minimal number of manual steps
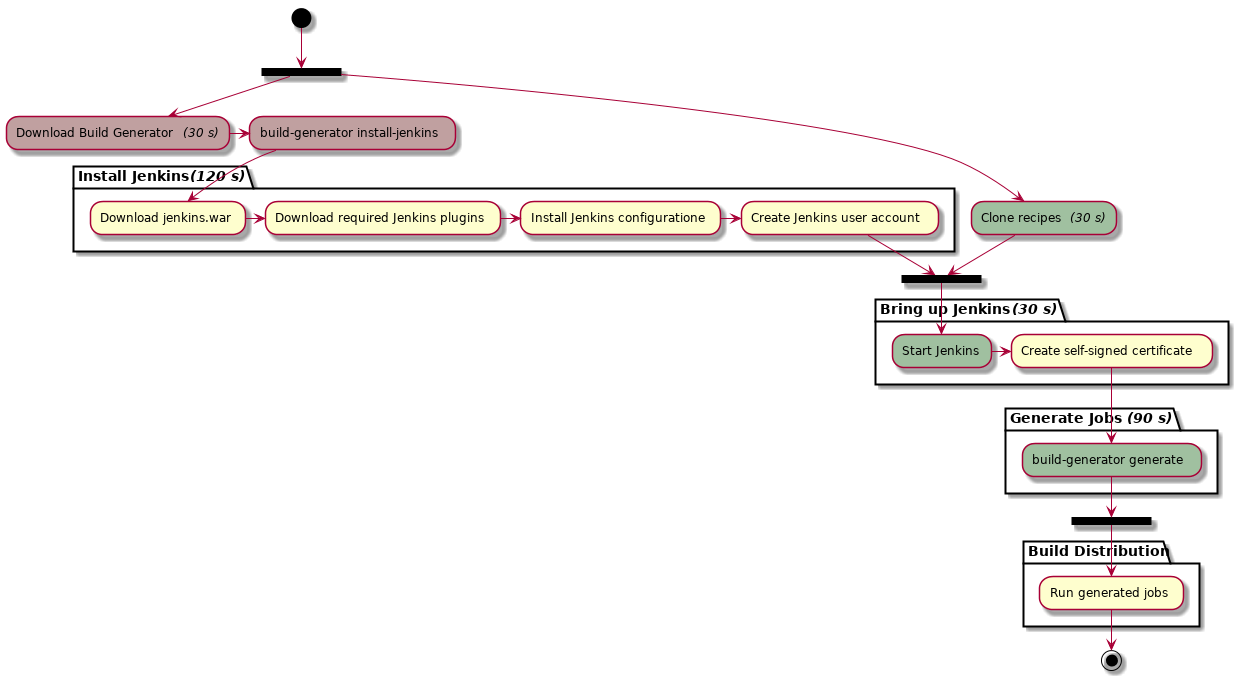
Bootstrapping – Process
Bootstrapping – Demo
- Get generator binary from https://github.com/rdtk/generator/releases
Install Jenkins
./build-generator install-jenkins \ --profile local-docker \ -u jan -p test -e a@b.c \ install-test # Takes between 60 and 300 seconds cd install-test ./start_jenkins
Clone recipe repository
git clone -b wip-docker https://opensource.cit-ec.de/git/citk
Generate Distribution Jobs
./build-generator generate \ -u jan -p test \ -D 'view.create?=true' -D view.name='Demo 1' \ citk/distributions/build-generator-nightly.distribution
- Result: https://localhost:8080/view/Demo 1/
Docker-based Jenkins Slaves
Docker Slaves – Motivation
Build generator supports different targets/modes:
- Jenkins jobs for continuous integration, deployment, mixture of both
- Makefile, DockerFile
- Jenkins jobs using Docker slaves
Advantages of Docker slaves:
- Full isolation between jobs and from host system (good for CI, reproducibility)
- Install dependencies in container – no side-effects on host system
- Build, test on different Linux platforms independent of host
- Share runnable systems as Docker images
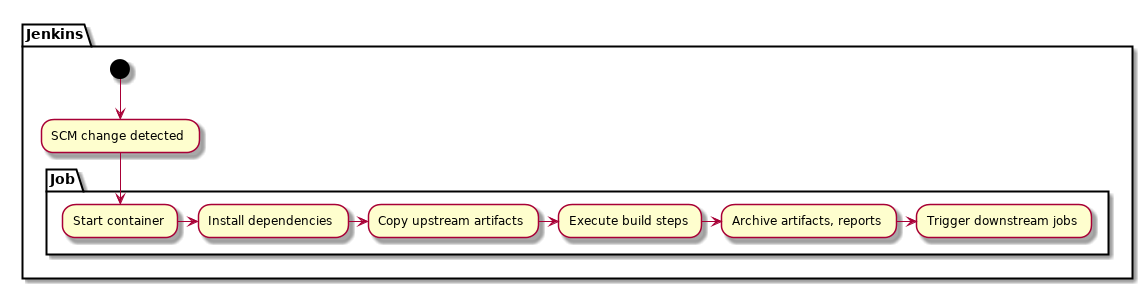
Docker Slaves – Process
Docker Slaves – Demo
Generate Distribution Jobs
./build-generator generate \ -u jan -p test \ -D 'view.create?=true' -D view.name='Demo 2' \ -m ci-docker \ citk/distributions/cogimon-core-nightly.distribution
- Result: https://localhost:8080/view/Demo 2/
Thank You for Your Attention!
Summary
- General approach
- System description model and language
- Dependency and metadata analysis
- Specific aspects
- Build generator tool
- Bootstrapping
- Docker slave configuration
- Research software catalog
Questions?
Backup Slides
Catalog – Demo
Docker Slaves – Monolithic Process